02.04.25 – Interdisziplinäre Forschergruppe
Qualitäts-Check für 3D-gedruckte Flugzeugteile
Im Projekt „Enabl3D“ entwickeln Forschende nun eine ausreichende Qualitätssicherung für Bauteile, die in der Luftfahrt eingesetzt werden sollen.
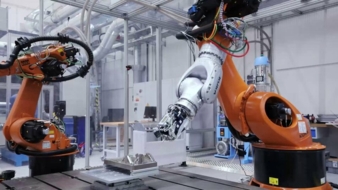
Robotergestützte Messung an 3D-Baujob mittels Messkopf von Imprintec. © Fraunhofer IPA, Foto: Rainer Bez
Der 3D-Druck hat großes Potenzial in der Fertigung. So lassen sich mit ihm bionische Leichtbauteile für die Luftfahrt herstellen, die den CO2-Ausstoß deutlich senken können. Für solche und andere sicherheits-kritische Teile ist eine Inline-Qualitätssicherung elementar. Schließlich müssen die Bauteile engmaschig überprüft werden, bevor sie in Passagier- und Cargomaschinen verbaut werden. Das Problem: Baugleiche gedruckte Teile können geringfügige Unterschiede aufweisen, die Ergebnisse der Materialprobentests lassen sich daher nicht hundertprozentig auf weitere Bauteile übertragen. Bisher übliche zerstörende Prüfungen sind wegen des hohen Ressourcen- und Energiebedarfs keine Alternative. Gleiches gilt für aufwendige Technologien wie Röntgen.
Härtemessung mit einem Industrieroboter
Künftig könnte jedes einzelne Bauteil aus dem 3D-Drucker zerstörungsfrei getestet werden: Mit einer Prüfmethode, die von der Imprintec GmbH in Zusammenarbeit mit der Fraunhofer-Einrichtung für Additive Produktionstechnologien IAPT und der VisiConsult GmbH im Projekt „Enabl3D“ erprobt wurde. Die Qualitätseigenschaften werden über Eindringprüfung, Prozessmonitoring und Mikro-Computertomographie erfasst – am fertigen Bauteil, schnell und zuverlässig. Im Teilprojekt „Integration von Härtemesstechnik“ holte das Team auch die Experten vom Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA an Bord. Das Ziel lag darin, den Messkopf für eine automatisierte Anwendung mit einem 6-Achs-Industrieroboter zusammen- zuführen.
„Gemeinsam mit der Imprintec GmbH haben wir erste Versuche und Machbarkeitsstudien durchgeführt, um den Messkopf über den Roboter in Serienfertigungen integrieren zu können“, erläutert Lukas Werdin, Wissenschaftler am Fraunhofer IPA. Die Herausforderung: Während das Messsystem im Prüflabor fest auf einem Tisch steht, können durch den Roboterarm Ungenauigkeiten auftreten. Die Forscher untersuchten daher, ob alle gewünschten Messpunkte am Bauteil mit dem Roboterarm erreichbar sind und mit welcher Genauigkeit sich die Messungen wiederholen lassen. „Unser Hauptaugenmerk lag auf der Positionierbarkeit, der Positioniergenauigkeit und der Qualität der Messungen“, konkretisiert Werdin.
Das Ergebnis war durchweg positiv. So konnten alle gewünschten Messpunkte mit dem Roboter angesteuert und untersucht werden, auch die Qualität der Messungen war sehr gut. „Die Abweichung lag im einstelligen Prozentbereich – ein sehr gutes Ergebnis für eine erste Anwendung im Zusammenspiel mit einem Roboter“, sagt Werdin.


