06.10.19
Industrieroboter mit Lasersystem strukturiert nahtlos große Flächen
Die Investition in eine konventionelle Anlage zum Laserstrukturieren übersteigt schnell 1 Mio. Euro. 80 % günstiger – aber bislang ungenauer – sind Industrieroboter. Das Fraunhofer IPT hat ein System entwickelt, das große Flächen über einen Roboter mit dem Laser präzise strukturieren kann.
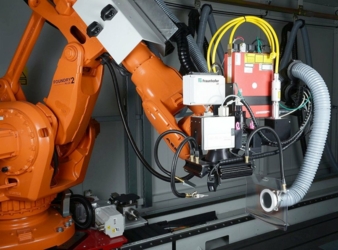
Kamerabasiert in Position gebracht, strukturiert ein kommerziell erhältlicher Industrieroboter große Flächen mit dem Laser. © IPT
Die systembedingte Ungenauigkeit kompensiert eine kamerabasierte, intelligente Positioniermethode: Zuerst werden mit dem Laser auf der zu strukturierenden Fläche Markierungen eingebracht, die später als Ankerpunkte für die Textur dienen. Der Roboter muss nun den Laser an die richtige Stelle bewegen. Hierbei wird die Ungenauigkeit des Roboters toleriert und die Abweichung von der geplanten Position anhand einer integrierten Kamera erkannt, die sowohl die Markierungen als auch die Strukturbereiche identifiziert. Mit diesen Informationen wird die abweichende Position des Roboters bereits vor der Strukturierung bestimmt. Er kann über eine adaptive Bahnplanung korrigiert werden, so dass die Oberfläche nahtlos strukturiert wird. Die anfangs eingebrachten Markierungen verschwinden Schicht für Schicht durch die Strukturierung des Lasers.
Das neue System befähigt den Industrieroboter, großflächig und hochpräzise mit dem Laser zu strukturieren, ganz ohne den zusätzlichen Einsatz kosten- und wartungsintensiver Technik. So gelingt es den Partnern, ein Großraumlasersystem zu entwickeln, das gegenüber konventionellen Systemen nicht nur robuster, sondern auch kostengünstiger ist. Das System lässt sich in das eigens am IPT entwickelte „Multi-Technology Robot System for Adaptive Manufacturing“ (Mira) integrieren. Mira bündelt Verfahren wie das Bohren, Polieren oder Schleifen mittels einer Adapterplatte am Roboterkopf in einer einzigen lasergeschützten Roboterzelle. So lassen sich verschiedene Fertigungstechniken in einem einzigen hybriden System integrieren und damit Rüst- und Nebenzeiten reduzieren. Außerdem eingebunden ist ein System zur 3D-Digitalisierung, durch das sich die Qualität der einzelnen Schritte ohne Umspannen überprüfen lässt. Der Industrieroboter ist auf einer Linearachse befestigt, wodurch sich die gesamte Aufspannfläche von 4 m x 2,5 m ausnutzen lässt.
Das Forschungsprojekt „Robo Tex“ wurde während seiner Laufzeit Juli 2016 bis Juni 2019 aus Mitteln des Europäischen Fonds für regionale Entwicklung (EFRE) gefördert (Förderkennzeichen: EFRE-0800314).
Blechexpo 2019, Halle 3, Stand 3214
Fraunhofer-Institut für Produktionstechnologie (IPT)
Steinbachstraße 17
52074 Aachen
Ansprechpartner ist Martin Kohse
Tel.: +49 241 8904-0